
Fin dal primo rilascio dell’Arena Commander, abbiamo aumentato la velocità massima, abbiamo riscalato la disponibilità del boost ed abbiamo ridotto la potenza dei propulsori di manovra. Sebbene tutte queste modifiche abbiano avuto degli effetti drastici sul gioco, nessuna ha apportato cambiamenti fondamentali al modello di volo – il che mostra quanto il bilanciamento delle statistiche possa influenzare un sistema! Comunque, dietro le quinte abbiamo continuato a lavorare su alcune modifiche sostanziali al modello di volo, che sono ormai arrivate ad un punto tale da permetterci di mostrare ai giocatori parte di quanto fatto.
La nuova funzionalità più evidente è data dalle modalità di volo aggiuntive: Precisione, Manovre di Combattimento Spaziale (SCM) e Crociera. Questi sono tutti profili IFCS incentrati sul comportamento della nave in funzione degli obiettivi sostanzialmente differenti mirati, rispettivamente, alle manovre a basso margine di errore, alle azioni di combattimento ed al volo sulle lunghe distanze. Sebbene possiate utilizzare soltanto una modalità di volo alla volta, le opzioni di volo accoppiato/disaccoppiato e l’insieme delle funzioni di volo assistito potranno ancora essere utilizzate per personalizzare ulteriormente la gestione della nave.
Quando decollerete, entrerete in Modalità di Precisione. In Modalità di Precisione, la velocità massima è significativamente ridotta e l’accelerazione è riscalata per fornire un maggiore controllo durante le manovre in prossimità di altri oggetti. Ciò renderà il decollo e l’atterraggio molto più facili, ma migliorerà anche il controllo attorno ad altri oggetti come gli asteroidi, i relitti delle astronavi o quando vi avvicinerete ad altre navi attive durante il Rifornimento in Volo o le manovre di Abbordaggio.
Dopo aver superato qualsiasi corpo nelle vicinanze ed aver acquistato velocità, vorrete passare alla Modalità di Manovre di Combattimento Spaziale. Lo SCM è uno dei cambiamenti più grossi al sistema di controllo di volo, ma in apparenza imita minuziosamente le attuali meccaniche di volo cui potreste essere già stati abituati dall’Arena Commander. Il vero potere della modalità SCM sta nel fatto che la velocità massima adesso viene calcolata dinamicamente come funzione della forza e della massa: F/m * T = Velocità Massima SCM – ciò vuol dire che qualsiasi modifica all’accelerazione della nave (come i cambiamenti all’equipaggiamento, la raccolta di materiale, ecc) influenzerà la velocità massima SCM. Abbiamo incorporato i calcoli SCM in maniera tale che sarà la vostra abilità nel frenare su un qualsiasi asse di rotazione (x o z) a determinare la velocità massima a cui sarà in grado di volare la vostra nave. Ciò vuol dire che aggiornare i propulsori di manovra della nave in genere risulterà nel conseguimento di una maggiore velocità massima permessa dallo IFCS. Inoltre, questa velocità sarà determinata dall’asse di rotazione principale della nave, il che vuol dire che il miglior controllo sullo scivolamento sarà ottenuto ruotando attorno all’asse principale, piuttosto che attorno ad uno di quelli secondari. Ogni nave presenta configurazioni differenti di assi principali e secondari: spetta al pilota imparare quali essi siano e come sfruttare i loro vantaggi in volo.
C’è un altro, entusiasmante vantaggio nello SCM: I Postbruciatori Mentre l’attuale meccanica di boost vi fornisce una migliore accelerazione ed un migliore controllo sullo scivolamento, i Postbruciatori vi forniranno una maggiore velocità massima, pur conservando lo stesso controllo relativo. Questo è il loro funzionamento: Nella modalità SCM, la velocità massima viene impostata in accordo con la vostra abilità di accelerare ad una certa velocità in un dato periodo di tempo. Dal momento che il boost aumenta la vostra accelerazione, aumenta anche la vostra velocità massima. Il meccanismo di funzionamento del boost così come è ora verrà conservato, ma adesso i giocatori potranno scegliere come spendere il loro carburante di boost limitato: se usarlo per raggiungere la velocità massima e modificare rapidamente le distanze, oppure se sfruttarlo per frenare meglio e migliorare la gestione del velivolo.
I Piloti saranno adesso in grado di utilizzare la Modalità Crociera per i viaggi a lunga percorrenza all’interno della stessa zona locale. Se il limite di velocità definito nello SCM fornisce al pilota un maggior controllo alle spese della velocità, la Modalità Crociera fornisce al pilota maggiore velocità alle spese del controllo. Sebbene la velocità massima sia elevata, l’accelerazione disponibile non cambia, il che vuol dire che per raggiungere la velocità massima di Crociera saranno necessari circa 15-20+ secondi, mentre la capacità di virata non scalerà con la velocità e fermarsi utilizzando i normali retro propulsori della nave richiederà molto più tempo.
Dal momento che le velocità di Crociera possono facilmente quintuplicare o più le velocità permesse dallo SCM, che invece possono essere modificate in condizioni di sicurezza, lo IFCS impone una virata controllata per assicurarsi che il pilota non entri in una condizione di scivolamento incontrollabile. Ciò vuol dire che il muso della nave è bloccato nella stessa direzione del vettore velocità e che nella modalità Crociera le manovre si concentrano molto più sull’aggiustamento della traiettoria che sulle virate vere e proprie. E’ inutile dire che la modalità Crociera non è assolutamente pensata per essere utilizzata in combattimento, all’interno dei campi di asteroidi o sulle rotte spaziali altamente trafficate.
Ovviamente, la modalità disaccoppiata potrà sempre essere utilizzata per ruotare liberamente a velocità da crociera. I piloti più astuti impareranno velocemente ad utilizzare la modalità disaccoppiata ed il boost per frenare il prima possibile mediante i loro propulsori principali. Al contrario, scopriranno anche che tentare di cambiare la rotta di 90° utilizzando la modalità disaccoppiata costituirà un biglietto espresso per l’altro mondo, dal momento che le alte forze-G sostenute durante una manovra simile porteranno rapidamente al black-out o al red-out.
Oltre queste modalità di volo c’è il Viaggio Quantistico, il livello in cui tutte le navi sono limitate alla stessa velocità massima di 0.2c. Una volta attivata l’Unità Quantistica, la velocità della nave aumenterà fino al raggiungimento del limite di 0.2c – piccoli salti potrebbero non raggiungere questa velocità – in quanto la nave stessa sperimenterà accelerazioni relativamente modeste. A queste velocità, piccole variazioni dell’angolo di movimento porteranno a rotte di volo completamente differenti, per cui in queste condizioni le navi più lente avranno la possibilità di sfuggire a quelle più veloci che stanno cercando di abbordarle. Ovviamente, viaggiare a queste incredibili velocità è piuttosto pericoloso, per cui il computer della nave vi farà uscire automaticamente dal Viaggio Quantistico qualora venga rilevata la possibilità di collisione, oppure se la nave avrà gli scudi abbassati.
Uno degli obiettivi di design risalenti all’alba del progetto è il concetto secondo cui, all’interno del mondo di gioco, il software di controllo di volo dovrebbe essere fisicamente rappresentato da un oggetto. Ma fino ad ora il sistema IFCS è rimasto completamente nascosto dietro le quinte ed è stato gestito mediante file XML (relativamente) statici di definizione della nave. Negli ultimi mesi abbiamo lavorato parecchio alla preparazione dei blocchi di parametri IFCS per la migrazione nei moduli avionici che potranno essere scambiati o aggiornati. Ogni modulo viene utilizzato con una nave specifica e contiene tutte le impostazioni ed i parametri di cui lo IFCS necessita per sapere come far volare l’astronave nei limiti delle specifiche ingegneristiche stabilite. Dietro le quinte, ciò renderà molto più semplice per i designer la messa a punto ed il bilanciamento delle navi, oltre che l’aggiornamento dei propulsori, e ci darà maggiore flessibilità nella definizione di caratteristiche uniche per lo scafo delle varianti delle navi. Ma la parte più entusiasmante di ciò consiste nel fatto che, presto, i giocatori saranno in grado di aggiornare il loro software di controllo di volo assieme all’hardware dei loro propulsori per realizzare una nave che rispecchi il loro stile.
Il cambiamento più importante apportato allo IFCS è il passaggio ad un sistema di controllo del movimento di 3° ordine. Prima di questo rilascio, per il controllo del movimento della nave lo IFCS utilizzava un sistema basato sui feedback. Il profilo di movimento di questo sistema di controllo basato sui feedback (un controller IP) era una sinusoide smorzata esponenzialmente. Il grafico in Fig. 1 mostra sia il controllo sull’accelerazione che quello sulla velocità con il passare di quest’ultima da 0 a 100 m/s.
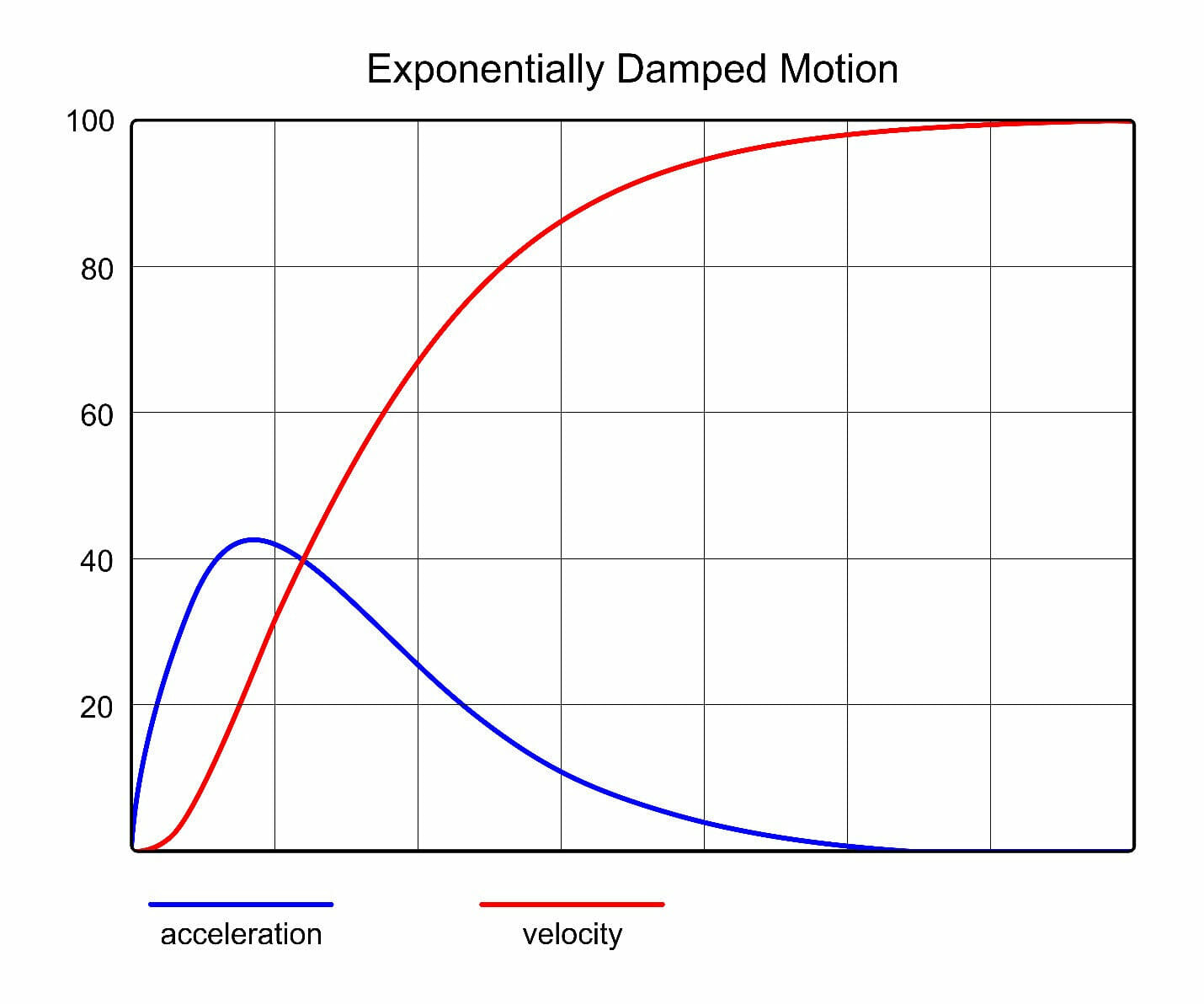
Questo era un sistema di controllo iterativo che non faceva assunzioni sullo stato passato o futuro della nave, ma si preoccupava semplicemente di ridurre la discrepanza tra lo stato attuale del veivolo e quello desiderato. Per questo motivo, si adattava bene alle nostre necessità, in quanto i danni subiti e l’applicazione di forze esterne impreviste possono causare movimenti imprevedibili.
A complicare ulteriormente la faccenda, dal momento che lo IFCS è limitato dalla spinta realmente fornita dai propulsori, il profilo di movimento reale in-game presenta un tetto massimo. Questo profilo è mostrato in Fig. 2, mentre quello non limitato è riportato sullo sfondo a scopo di riferimento.
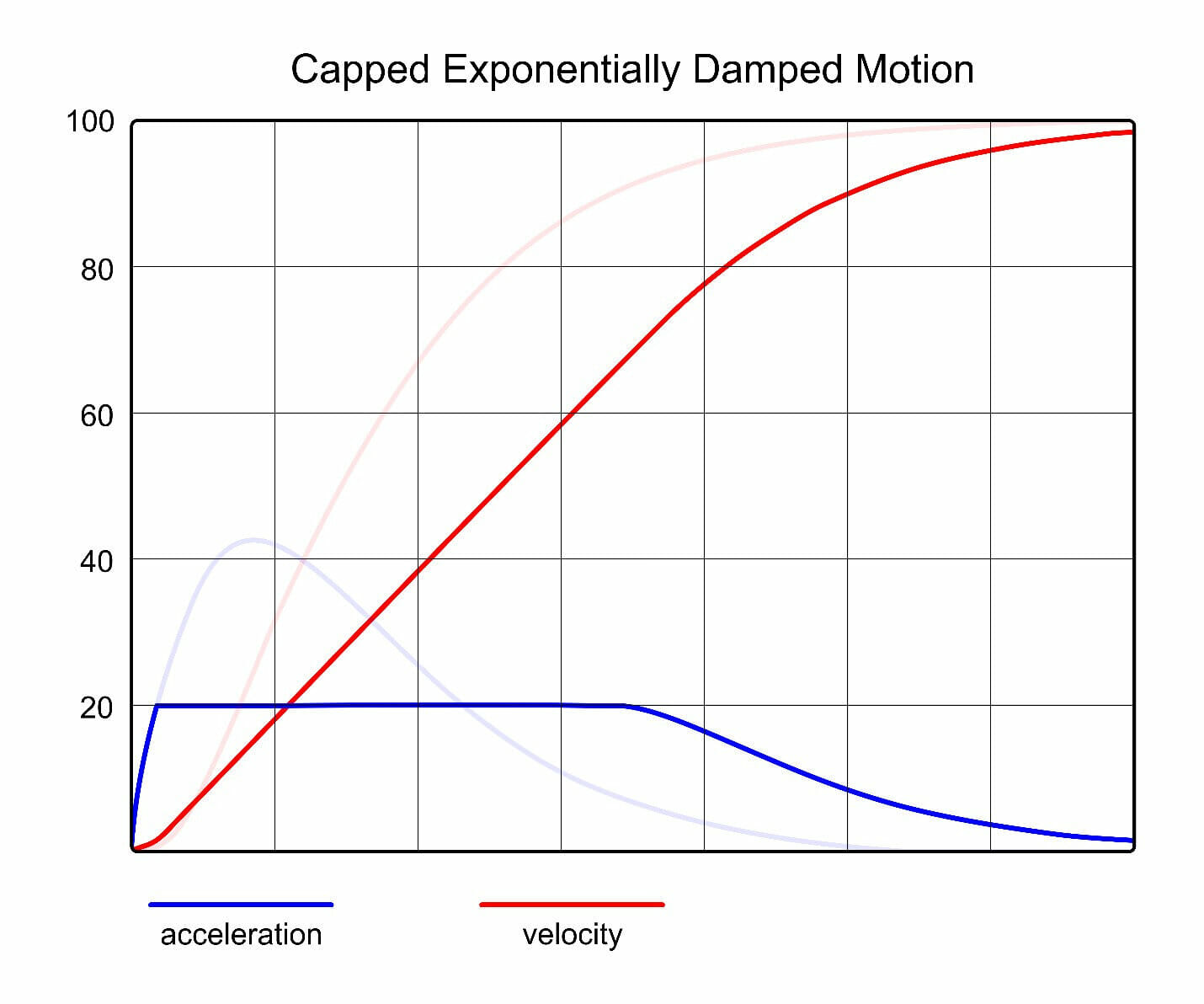
Il grafico in Fig. 2 è una descrizione piuttosto accurata del controllo attuale della velocità fornito alle astronavi di Star Citizen, sia per quanto riguarda il movimento lineare che per quello rotazionale. Sebbene questo profilo di movimento presenti diversi vantaggi, ci sono anche alcuni svantaggi significativi, inclusi a) la difficoltà nel prevedere lo stato futuro della nave che si sta muovendo mediante questo controller e b) una risposta di controllo asimmetrica con un lungo tempo di stabilizzazione. In particolare, i giocatori hanno frequentemente notato che il lungo tempo di stabilizzazione conferisce alle navi di Star Citizen una sensazione di “instabilità”.
Per risolvere questi problemi, il nuovo rilascio dello IFCS inizierà ad utilizzare un sistema di controllo su due livelli. Il primo livello, il controllo a comando diretto, calcolerà il movimento ideale della nave, mentre il secondo livello, quello di feedback, fornirà le correzioni degli errori finalizzate a mantenere il comportamento della nave il più aderente possibile al movimento ideale, anche in condizioni di danneggiamento o in seguito a forze esterne inaspettate. Pertanto, l’attuale algoritmo di movimento sarà ancora parte integrante del sistema e continuerà a fornire la stessa tolleranza agli errori, ma non costituirà più la parte dominante del profilo di movimento (ad eccezione dei casi di errore estremo del sistema).
Il sistema di controllo a comando diretto utilizzerà i movimenti ideali del 3° ordine, come mostrato dal grafico in Fig. 3.
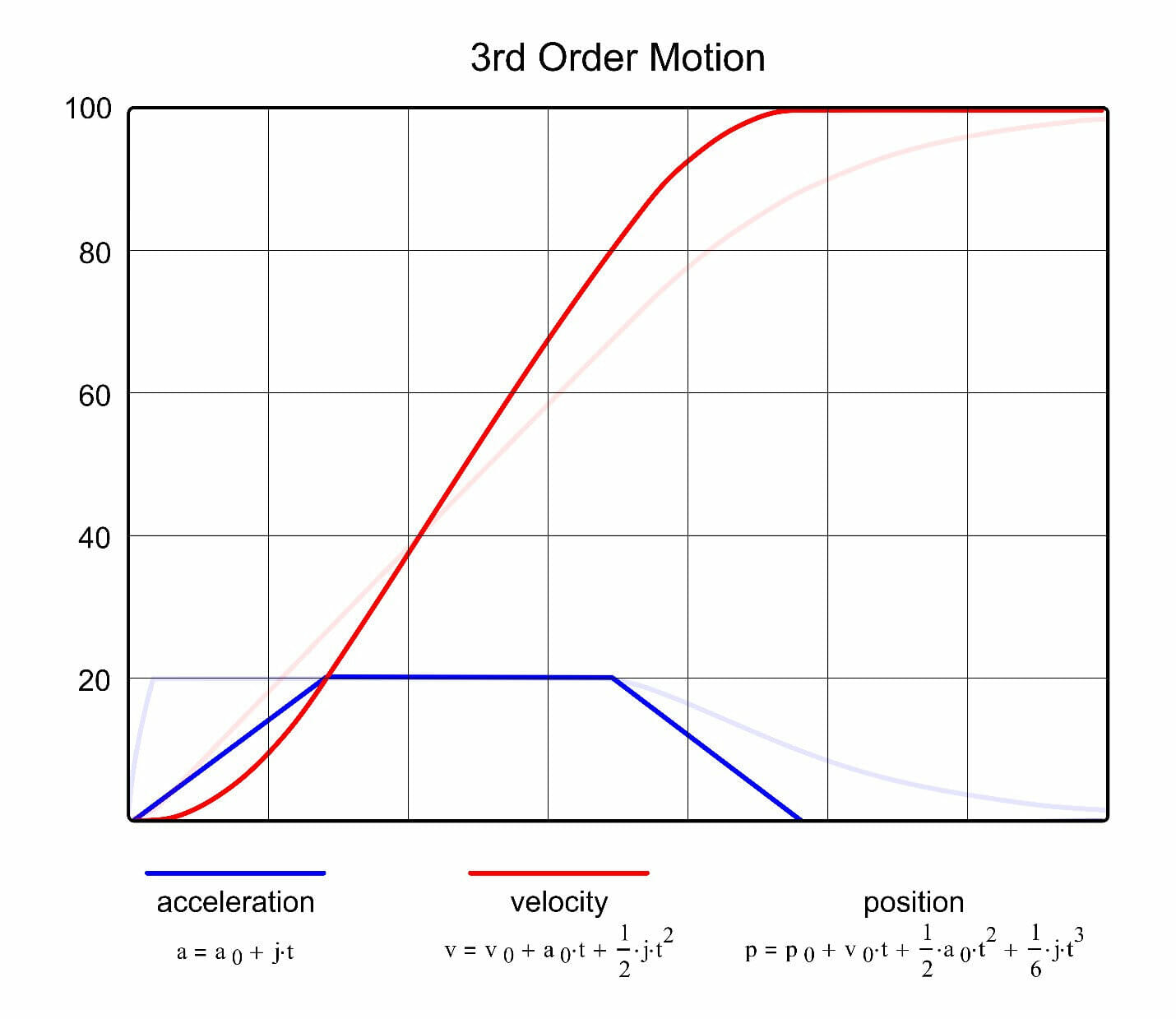
A differenza dell’algoritmo di feedback, questo profilo di movimento è del tutto prevedibile. Saprete in qualsiasi momento quanto tempo richiederà ad una nave per raggiungere una nuova velocità o posizione a partire da un certo insieme di condizioni iniziali. Inoltre, la fase di aumento dell’accelerazione potrà essere modificata così da conferire alla nave un movimento naturale e morbido, privo del comportamento di stabilizzazione esagerato tipico dell’attuale sistema di controllo.
In pratica, ciò risulterà in un’ampia gamma di comportamenti di volo delle astronavi, che andranno dall’elevata reattività con movimento a strappi, simile a quello delle macchine sportive ad elevate prestazioni, fino al controllo meno reattivo ma più morbido, caratteristico delle auto di lusso.
La velocità con cui cambierà l’accelerazione è stata definita “strappo”, ed è essenzialmente l’accelerazione della vostra accelerazione. Un maniera semplice per comprendere lo strappo è pensare al modo in cui guidate una macchina. Quando fate decelerare la vostra macchina per fermarla, applicare una pressione costante al pedale dei freni produrrà un rallentamento lineare nel tempo. Ma se applicherete tutta assieme questa stessa pressione al pedale, il cambiamento sarà brusco e repentino. Invece, applicando ai freni una pressione progressivamente inferiore man mano che vi avvicinerete allo stop (ovvero “alleggerendo” i freni), cambierete la velocità della decelerazione ed il processo di fermata sarà molto più morbido e più confortevole. Alleggerire i freni è un’azione a strappo ridotto, mentre alzare improvvisamente il piede dal pedale è un’azione a strappo elevato.
Come riferimento, il grafico in Fig. 4 mostra un tipico movimento del 2° ordine (accelerazione costante, velocità lineare) utilizzato in molti giochi.
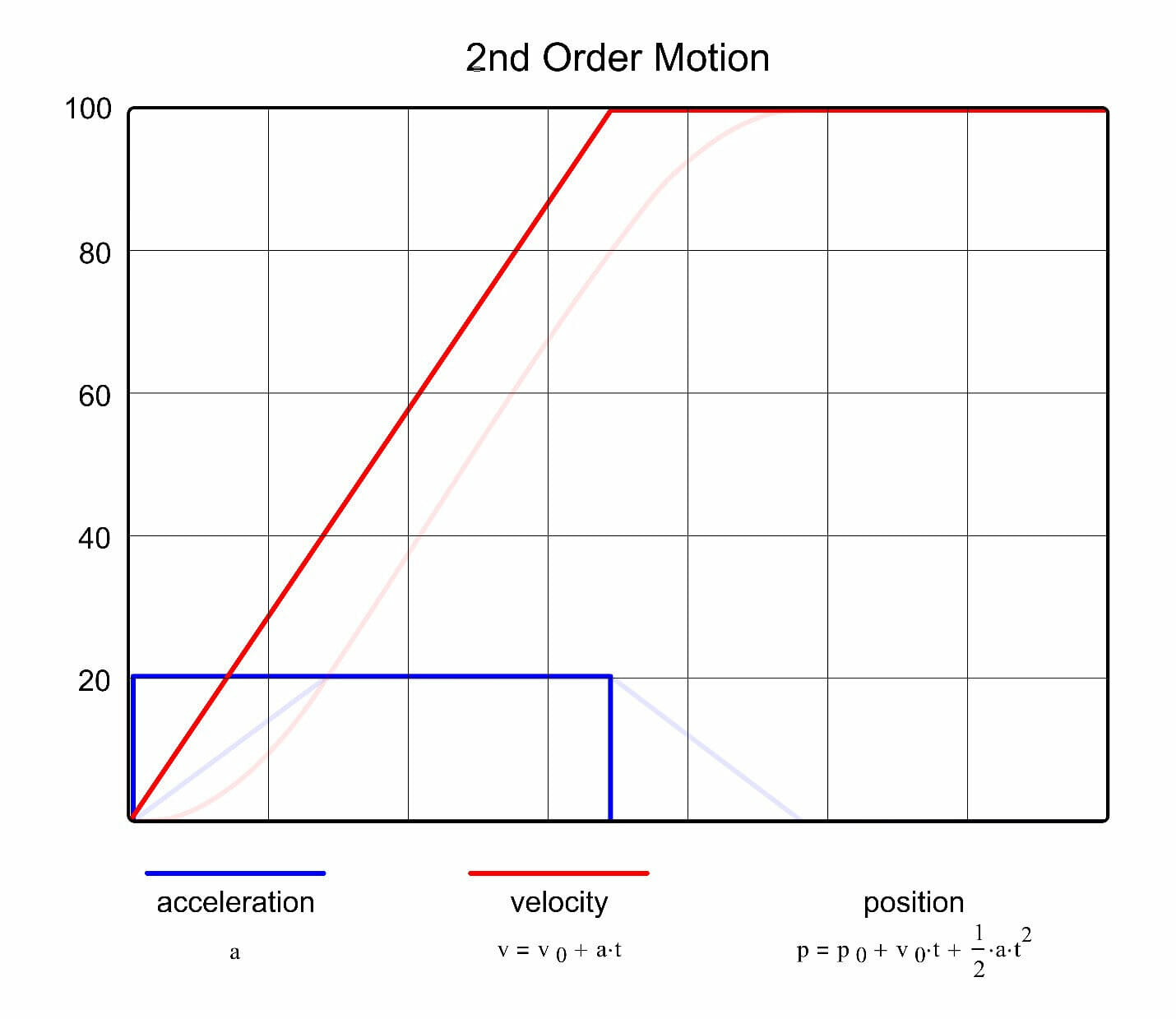
Sebbene il movimento del 2° ordine rappresenti un modello di controllo molto più semplice, esso determina anche un movimento della nave molto più rigido, quasi meccanico. Il sistema del 3° ordine ci permetterà di mettere a punto le navi e fare in modo che la loro risposta sia rigida o morbida a seconda delle nostre necessità.
Il bilanciamento del modello di volo delle astronavi è uno dei compiti più difficili e delicati che dobbiamo fronteggiare in questo progetto. Il passaggio ad un sistema del 3° ordine e l’aggiunta di una modalità di determinazione dinamica della velocità ha necessitato di un ribilanciamento quasi totale delle caratteristiche di gestione delle astronavi. Questo vuol dire che molto probabilmente ognuna delle navi attualmente disponibili avrà un comportamento parecchio differente da quello cui vi ha abituati l’Arena Commander. Abbiamo prestato grandissima attenzione per assicurarci che ciascuna nave conservasse il proprio posto in relazione alle altre astronavi presenti nell’universo. Siamo consapevoli del fatto che ogni cambiamento di questo livello probabilmente scatenerà un vivace ed appassionato dibattito di confronto tra il nuovo sistema e quello vecchio, ma siamo certi che questi cambiamenti ci permetteranno di conferire alle navi un comportamento più realistico, oltre che permettere loro di avere una personalità più peculiare di quanto fosse possibile in passato ed esercitare un controllo più preciso sulle loro caratteristiche.
Inoltre, il passaggio al parametro dello strappo implica che le azioni imprevedibili delle manovre di evasione sono state intrinsecamente nerfate, in quanto adesso il sistema sarà leggermente più lento nell’esecuzione delle azioni repentine – mentre gli input specifici, come quelli utilizzati nel tentativo di uscire da un movimento di scivolamento, sono rimasti ampiamente inalterati. Il movimento di terzo ordine è inoltre molto più semplice da assimilare per il cervello umano, per cui il controllo sarà molto più intuitivo e l’overshooting molto meno frequente.
Grazie al parametro di strappo, diventa disponibile un nuovo comportamento di ‘volo stabilizzato’. Essenzialmente, questo vuol dire che impostando un valore di strappo ridotto, sarà possibile impostare un motore in maniera tale da farlo lavorare con un maggiore Rapporto di Carico in relazione alle sue dimensioni, permettendoci così di creare navi – come la Hull o l’Aurora – capaci di trasportare grandi quantità di merci senza per questo diventare anche le astronavi più veloci dell’universo quando scariche. E sebbene tutte le navi saranno più veloci quando saranno prive di cargo, rispetto a quando invece saranno cariche, potremo impostare navi differenti con diversi livelli di perdita delle prestazioni in seguito al caricamento di merci a bordo.
Il primo passaggio che rilasceremo sul PTU sarà per l’appunto questo: un primo passaggio. E’ stato pensato per stabilire il tono generale della direzione presa per ogni nave, non l’impostazione finale. Come sempre, continueremo a testare ed a mettere a punto il sistema, ed ovviamente controlleremo i vostri feedback per vedere dove potremmo dover intervenire per smussare gli spigoli vivi o le conseguenze involontarie di tutto ciò.
Questi cambiamenti comporteranno delle altre piccole, interessanti conseguenze, ma per il momento parleremo del ridirezionamento dell’energia dei propulsori.
Il ridirezionamento della propulsione è il procedimento mediante cui la spinta generata dal motore principale viene convogliata attraverso il sistema di distribuzione fino alle varie bocchette (o ‘mavs’, come le ha soprannominate la comunità) in cui quella forza verrà effettivamente utilizzata. Ciò significa che i motori principali diventeranno molto più importanti di quanto non lo siano stati finora nell’Arena Commander, ed in futuro questo implicherà che sulle nostre navi ammiraglie potremo avere delle vere e proprie sale motori complete. Invece che avere una nave ricoperta di piccoli motori, adesso ci saranno delle bocchette manovrabili, per cui se il motore principale verrà danneggiato, allora anche tutti i propulsori di manovra ne risentiranno di conseguenza. Quando ciò accadrà, le navi potranno utilizzare dei giroscopi interni di emergenza o dei sistemi di manovra a bassissima potenza, ma questi saranno molto lenti e deboli. L’aspetto fantastico di tutto questo è la maniera in cui apra a nuove opportunità di danneggiamento del comportamento in volo delle navi.
Danni a carico del sistema di distribuzione della spinta di una bocchetta ridurranno l’entità delle forze che questa sarà in grado di generare, e potrebbe persino causare una spinta non intenzionale nel punto in cui si è subito il danno.
Le bocchette stesse saranno classificate in base al calore ed alla potenza, limitando di conseguenza la spinta complessiva disponibile – un limite che potreste essere in grado di superare, ma a vostro rischio e pericolo. Il risultato è un equilibrio tra i comportamenti di volo imposti dal design della nave e lo stato dei componenti, comportamenti che un pilota esperto potrebbe spingere ai loro limiti estremi per camminare sul filo del rasoio che divide la vittoria dalla catastrofe.
Sono molti i modi in cui lo stato corrente di una nave possa deviare da quello ideale, come da richiesto dallo IFCS. Fino ad oggi abbiamo permesso al sistema di controllo di avere una padronanza perfetta nelle condizioni ideali, e ciò ha condotto ad un movimento dall’aspetto eccessivamente meccanico e spesso “vuoto”. Con il nuovo rilascio, non sarà più questo il caso. Sovrapposto al controllo di volo ci sarà sempre un qualche livello di errore nei propulsori o nei sistemi. In condizioni di funzionamento ottimali, questi errori si manifesteranno durante il movimento come delle piccole turbolenze, ma diventeranno sempre forti in seguito al danneggiamento dei propulsori, al surriscaldamento ed a vari altri fattori.
Il grafico in Fig. 5 mostra un esempio di profilo di velocità ideale del 3° ordine. Lo IFCS richiederà al sistema di propulsione la spinta necessaria per ottenere questo movimento.
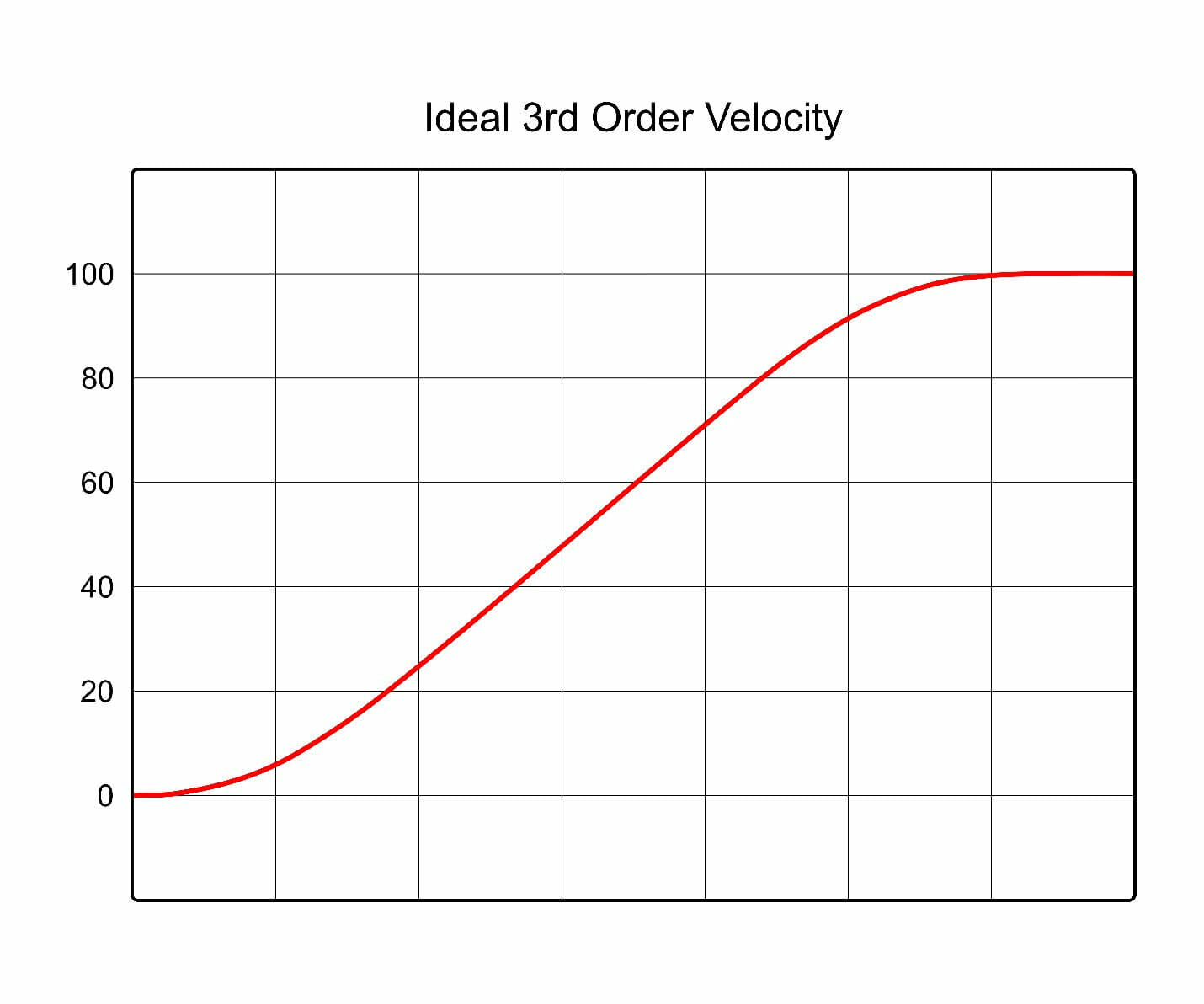
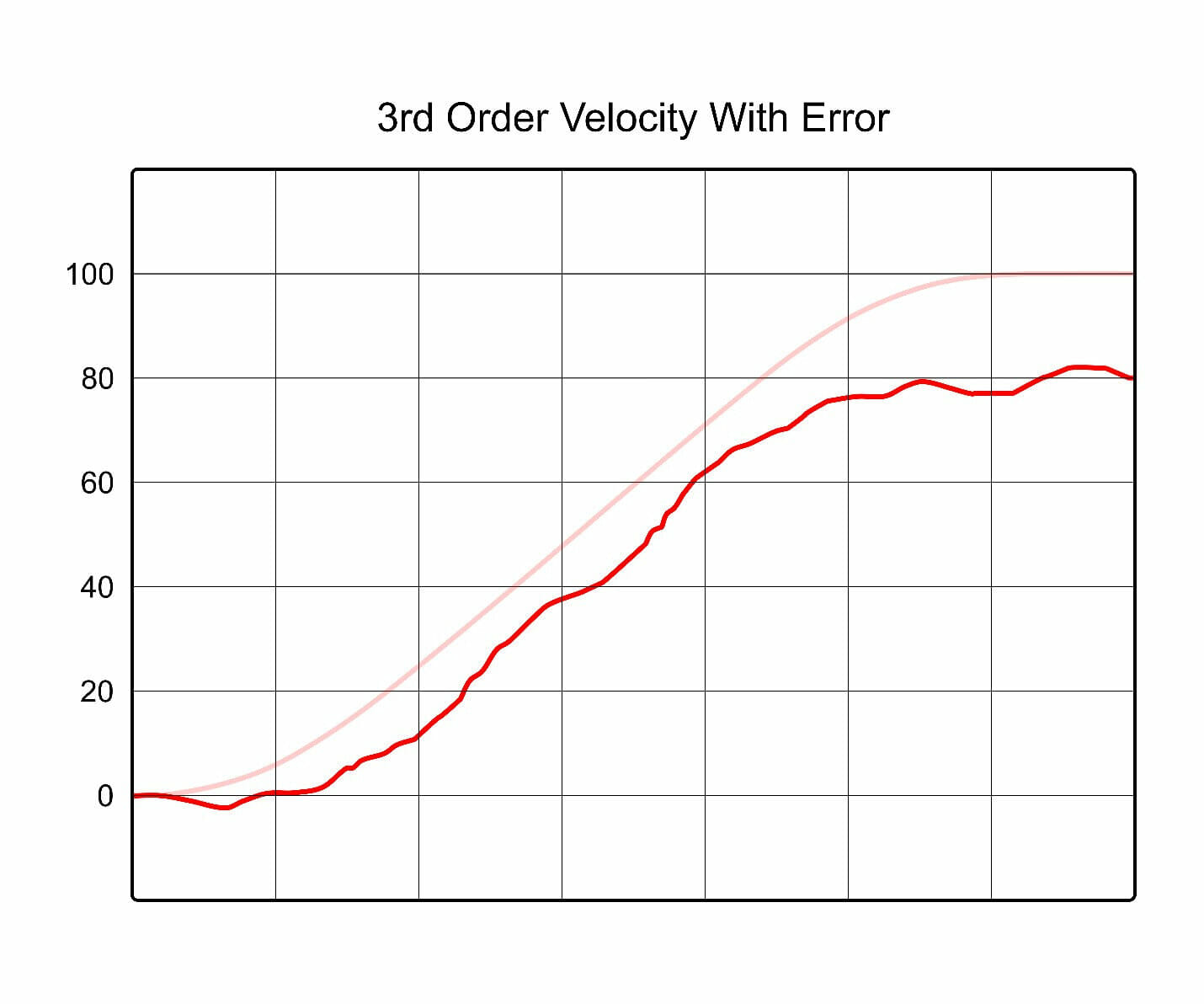
Tuttavia, a causa degli errori nei propulsori, che potrebbero essere dovuti a svariate fonti, come ad esempio un vettore o un livello di propulsione errato, oppure instabile, ecc., il movimento effettivo della nave potrà deviare da quello ideale. Il seguente grafico mostra un esempio estremo di un errore casuale del propulsore che determina la deviazione della velocità della nave dal suo andamento ideale lungo la transizione da 0 a 100 m/s. A causa degli errori nella reale accelerazione applicata nel tempo (tutte le azioni di una nave sono in ultima analisi realizzate tramite accelerazioni, mai come correzioni dirette della velocità o della posizione), la velocità finale raggiunta durante un cambiamento di movimento può differire significativamente da quella inizialmente desiderata. Lo IFCS ha richiesto il cambiamento di velocità riportato qui sopra, ma ha ottenuto quello riportato in Fig. 6.
E’ a questo punto che entra in gioco il sistema di feedback originale. Questo analizzerà lo stato corrente della nave in relazione a quello desiderato e genererà delle accelerazioni correttive aggiuntive per mantenere il movimento il più aderente possibile a quello ideale.
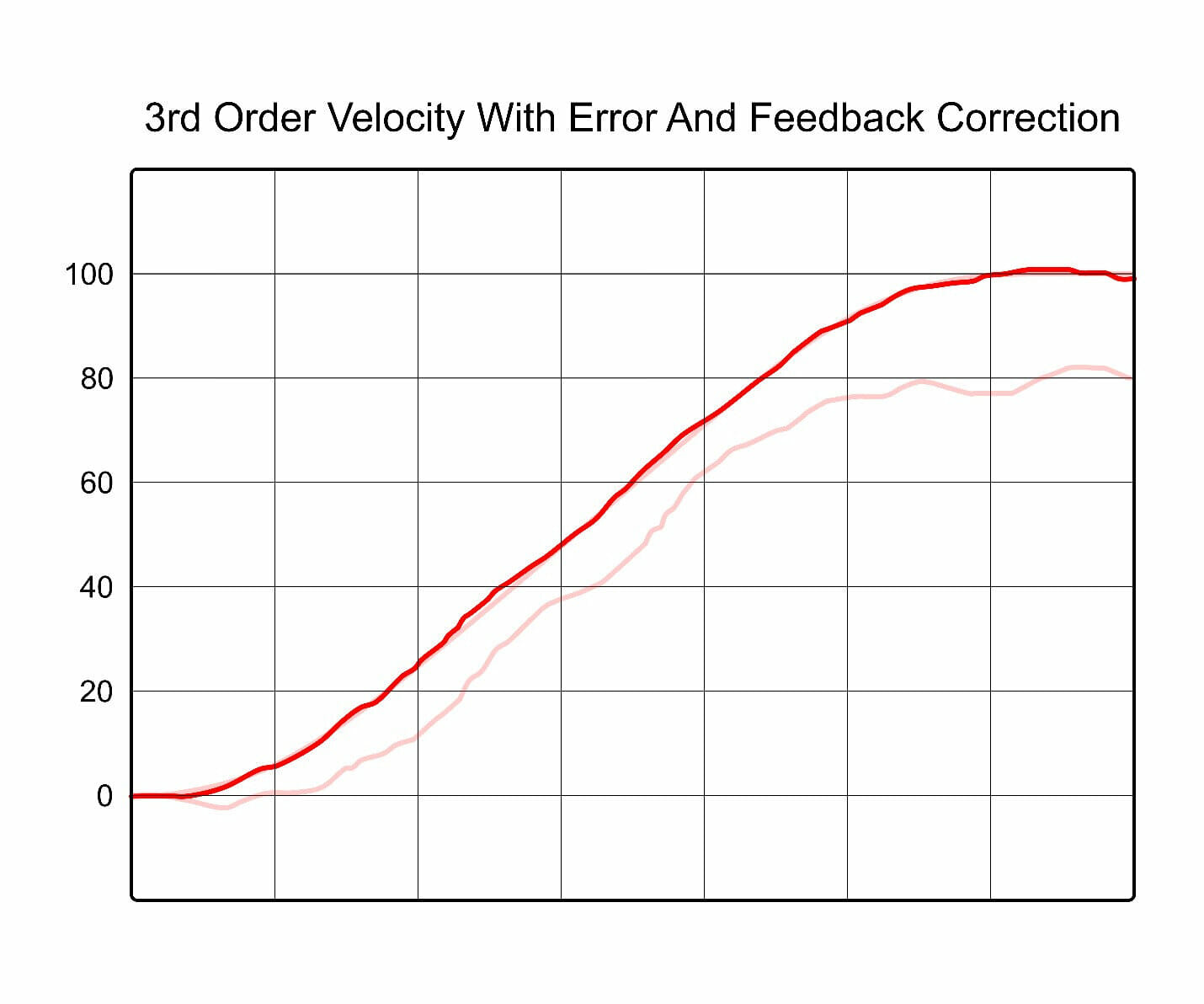
L’esempio mostrato qui in Fig. 7 riguarda l’errore nella velocità e la conseguente correzione di feedback, ma un esempio più ovvio di ciò sarebbe il controllo dell’altitudine in-game. Lo IFCS dispone di un sistema di controllo della reazione (RCS) che mantiene l’altitudine della nave al valore impostato dal pilota (il modulo di controllo). A causa dell’errore nei propulsori, assieme ad altri fattori esterni, l’altitudine reale della nave potrà deviare da quella ideale. Lo RCS utilizza il sistema di controllo dei feedback per generare la spinta e mantenere l’altitudine della nave al valore desiderato. In pratica, la turbolenza dei propulsori dovuta alle loro prestazioni non ottimali genererà un piccolo disallineamento nel muso della nave, specialmente quando si spingeranno i propulsori a piena potenza o quando si porterà la nave in uno stato di immobilità. Ma, come già ribadito, l’obiettivo è di rendere questo livello di rumore discreto, fatta eccezione per le condizioni di danneggiamento estremo. Questo elemento è più inteso a migliorare l’estetica del movimento che non ad influire sul comportamento in volo.
In ultima analisi, l’esperienza di Star Citizen sarà definita dalla combinazione di tutti questi sistemi, per cui per spiegare davvero il modello di volo, dobbiamo anche parlare del combattimento.
In Star Citizen, lo scopo del combattimento è quello di fornire un’azione frenetica a ritmo elevato, ricompensando al contempo la pianificazione e le tattiche ponderate. Ciò implica cose differenti per navi di dimensioni diverse – dalle intense baruffe dei caccia monoposto, alle battaglie di virata in stile WWII delle navi multi-equipaggio per puntare tutte le armi sul bersaglio, fino alle guerre di attrito e di posizionamento delle enormi navi ammiraglie – ciascuna di esse offrirà un’esperienza di combattimento unica. Tuttavia, la filosofia alla base di tutte queste sarà grosso modo la stessa: il combattimento è più divertente quando ci si destreggia tra vari livelli di rischio, ricompensa ed impegno.
Per la maggior parte delle navi, il minimo comune denominatore di ogni input è la rotazione. La sicurezza dell’equipaggio impedisce alle navi più grandi di effettuare virate aggressive, cosa invece molto più semplice per le navi di dimensioni minori. A livello offensivo, ciò migliorerà la capacità di mira (con dei vantaggi tanto minori, quanto maggiori saranno le dimensioni delle nave), ma dal punto di vista difensivo, i piloti più abili cercheranno di direzionare gli impatti inevitabili nei punti in cui i loro scudi o la loro corazzatura saranno più resistenti. Inoltre, l’aggiunta di una modalità di stabilizzazione degli input migliorerà i comandi di rotazione, limitando quest’ultima alla più bassa velocità massima disponibile ed eliminando così una grande fetta degli errori scalari dal modulo di controllo. Le caratteristiche della nave non verranno alterate da questo sistema, per cui le manovre continueranno realisticamente a favorire un asse particolare, coerentemente con il design del veivolo, ma i comandi stessi saranno più prevedibili ed intuitivi.
In genere, le navi vengono realizzate in maniera tale da favorire i motori principali, sebbene i loro rapporti di potenza siano parte integrante della personalità di ogni vascello. Ciò significa che, come abbiamo già avuto modo di vedere negli aggiornamenti recenti, gli scivolamenti e le manovre di volo richiederanno un po’ di pianificazione anticipata, anche quando si ricorrerà al boost. Questo tenderà a facilitare l’acquisizione del bersaglio, ma subire danni sarà un aspetto importante dell’esperienza di Star Citizen, nonché un elemento che intendiamo supportare ad ogni livello. La scelta di includere svariati componenti per ogni tipologia permetterà di ottenere un deterioramento più significativo delle capacità delle navi e di mantenerle operative anche dopo aver subito elevati livelli di danno. Dopo il combattimento, il vostro scafo sarà segnato dalle testimonianze delle vostre avventure più recenti. Oppure, se la situazione è davvero brutta, potrete riparare sul campo le navi e cercare di porre rimedio ai danni incombenti. Probabilmente sarà una buona idea prendersi cura delle linee refrigeranti prossime al blocco prima che queste portino alla rottura incontrollata del motore ed alla fusione dell’intero generatore di energia, che farà quindi esplodere la vostra nave (date un’occhiata alla Connie).
La capacità di subire maggiori quantitativi di danni sarà associata a livelli di impegno più elevati e duraturi e, quindi, anche ad una gestione più minuziosa di cose come il carburante, il calore, le forze-G. Maggiore sarà il numero di scorciatoie che prenderete, più vi ritroverete chiusi in un angolo. Se vorranno emergere vittoriosi, i capitani dovranno pesare i rischi a lungo termine con quelli a breve termine.
Ovviamente, in ultima istanza tutte queste modifiche si affideranno al supporto che il bilanciamento fornirà ai vari sistemi, e questo è un processo di lunga durata che richiede un impegno profondo e costante. Sistemare questo bilanciamento richiederà del tempo, ma l’obiettivo è di giocare con i punti di forza di ogni sistema e dimensione, nonché con le opportunità di gameplay che questi offriranno. Nel caso delle navi più piccole, il fattore determinante sarà la manovrabilità, per cui il vantaggio starà nel forzare il nemico ad addossarsi rischi sempre maggiori, fino ad esagerare e prestare il fianco ad un colpo fatale. Nello spazio le rotazioni sono facili, per cui potete stare certi che ogni nave di piccole dimensioni cui sparerete sarà in grado di restituirvi il favore di lì a breve. Una delle ragioni alla base di tutto questo è pura e semplice fisica, in quanto con l’aumentare delle dimensioni delle navi, la spinta necessaria per realizzare delle rapide virate cresce drasticamente, e per via del controllo di feedback e della gestione reattiva, le rotazioni della vostra nave avranno una finestra di errore minore rispetto a quella delle traslazioni. Di contro, le navi multi-equipaggio potranno permettersi dei periodi di vulnerabilità più lunghi, in quanto le meccaniche di riparazione in arrivo, assieme alla manipolazione degli scudi ed al ridirezionamento dell’energia, offriranno ad una nave sotto attacco svariati approcci per migliorare la propria situazione e ribaltare le sorti della battaglia.
Con l’aumentare delle dimensioni di queste navi, il gameplay continuerà a richiedere una sempre maggiore pianificazione tattica anticipata delle mosse, in cui il posizionamento e la gestione delle risorse della nave nel corso del combattimento diverranno un elemento sempre più importante. Un obiettivo chiave di questa tipologia di combattimento consiste nell’impedire che il successo o il fallimento siano due strade a senso unico, oppure, in altri termini, permettere che la battaglia venga determinata da errori sempre meno frequenti e sempre più marginali. Di base, Star Citizen è un gioco in cui il combattimento nave-nave dovrebbe rimanere divertente e chiaro anche quando una nave cargo cadrà in un’imboscata dei pirati, oppure quando una nave ammiraglia si ritroverà ad affrontare un gruppo di monoposto, mentre la perdita di possedimenti e/o della vita avrà un costo elevato. Non uscirete sempre vincitori da ogni combattimento, e quando subirete delle perdite, vogliamo che la motivazione sia collegata principalmente ad una questione di abilità. Vogliamo che questo gioco sia basato sull’abilità, ma vogliamo anche che nel PU possiate sperimentare un senso di avanzamento. Una Hornet F7C dovrebbe essere una nave obiettivamente migliore di una Mustang Alpha, ma la differenza in potenza non dovrebbe essere così estrema da impedire al pilota della Mustang di battere una Hornet – il combattimento sarà semplicemente più arduo.
Star Citizen è un gioco basato sulle scelte, per cui ogni volta che lascerete l’hangar, dovrete decidere quale nave vorrete pilotare, quali equipaggiamenti vorrete installare, chi vorrete avere nell’equipaggio, quale rotta vorrete prendere e persino dove e quando vorrete immagazzinare il cargo. Ogni nave avrà una propria personalità, ogni arma il suo compromesso – ed ogni percorso i suoi pericoli. L’obiettivo non è di permettere a tutti di fare qualsiasi cosa, ma di creare un ecosistema in cui i giocatori possano trovare la miscela di elementi perfetta per loro. Alcuni preferiranno imparare a padroneggiare un’unica nave con una precisa configurazione, e raggiungeranno il successo nella ridotta finestra della loro specializzazione, mentre altri cercheranno di adottare un equipaggiamento più variegato, che si adatterà agli ostacoli che si troveranno ad affrontare. Queste scelte influenzeranno tutto, dall’energia assorbita al calore generato, fino alla velocità stessa con cui volerà la vostra nave ed all’entità del suo scivolamento.
Non esiste la nave perfetta – esiste soltanto la nave perfetta per voi.
Partecipate alla discussione che si tiene qui: https://forums.robertsspaceindustries.com/discussion/293412/flight-model-ifcs-2-0-feedback-and-discussion


